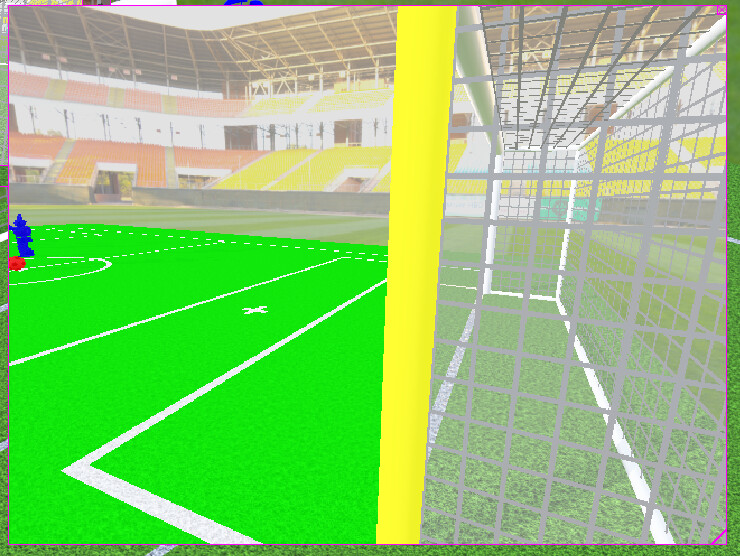
I’ve been working on getting segmentation data from Webots for our vision system but have reached a problem. The cameras do not seem to be able to detect anything past the netting of the goals, as seen in the below image.
I believe you are not allowed to use camera Recognition for Robocup. In any case, the TCP/IP protocol will provide you only with RGB images, nothing else. So, you will have to recognize objects from these RGB images.