Dear RoboCupper,
There is an issue in the HingJointWithBacklash.proto:
During walking or kicking, Sweaty disappears sometimes unpredictable.
This phenomena can be reproduced, in case we lift Sweaty slightly and let it fall down:
http://www.hochberg.de/RoboCup/SweatyHingeJointWithBacklashOrig.gif
{kind=link}
There is a workaround:
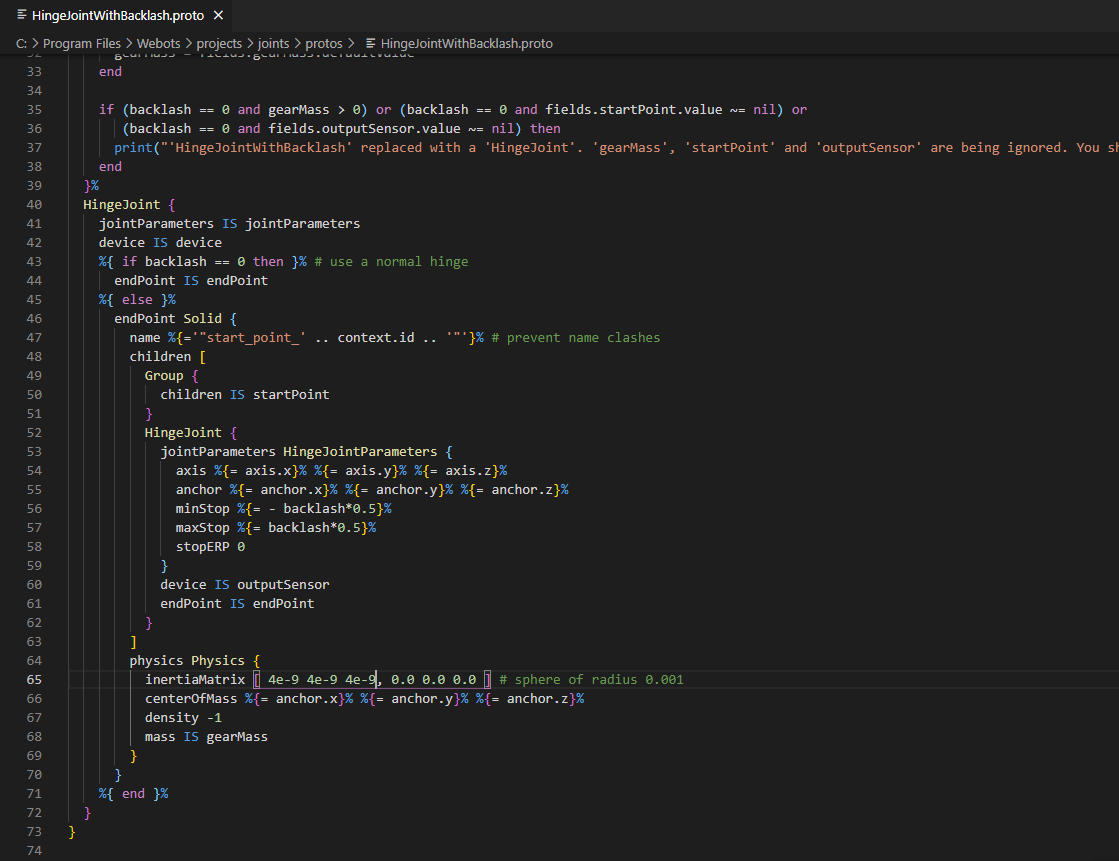
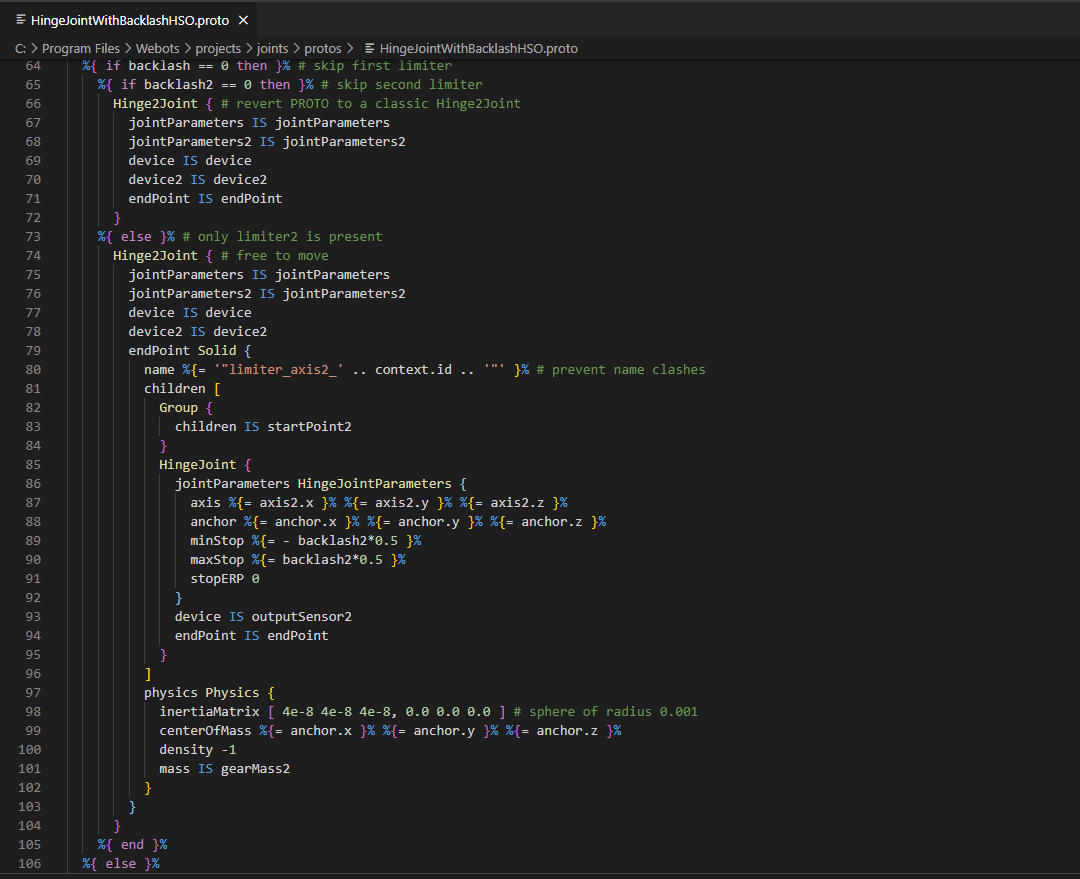
In case we increase the diagonals of the inertia matrix of the joint from 4e-9 to 4e-8, Sweaty never disappears.
The program ist stable, even if we drop Sweaty from an unreasonable height:
Probably other teams also have the problem of the sudden, unpredictable disappearance of the robot. In this case, we suggest a general modification of the proto.
We will upload our container using HingeJointWithBacklashHSO.proto.
Uli for Sweaty-Team
Original Proto:
http://www.hochberg.de/RoboCup/SweatyHingeJointWithBacklashOrig.jpg
{kind=link}
Modified Proto:
http://www.hochberg.de/RoboCup/SweatyHingeJointWithBacklashModifiedInertia.jpg
{kind=link}